specify URDF frames in CAD model #177
Description
Is your feature request related to a problem? Please describe.
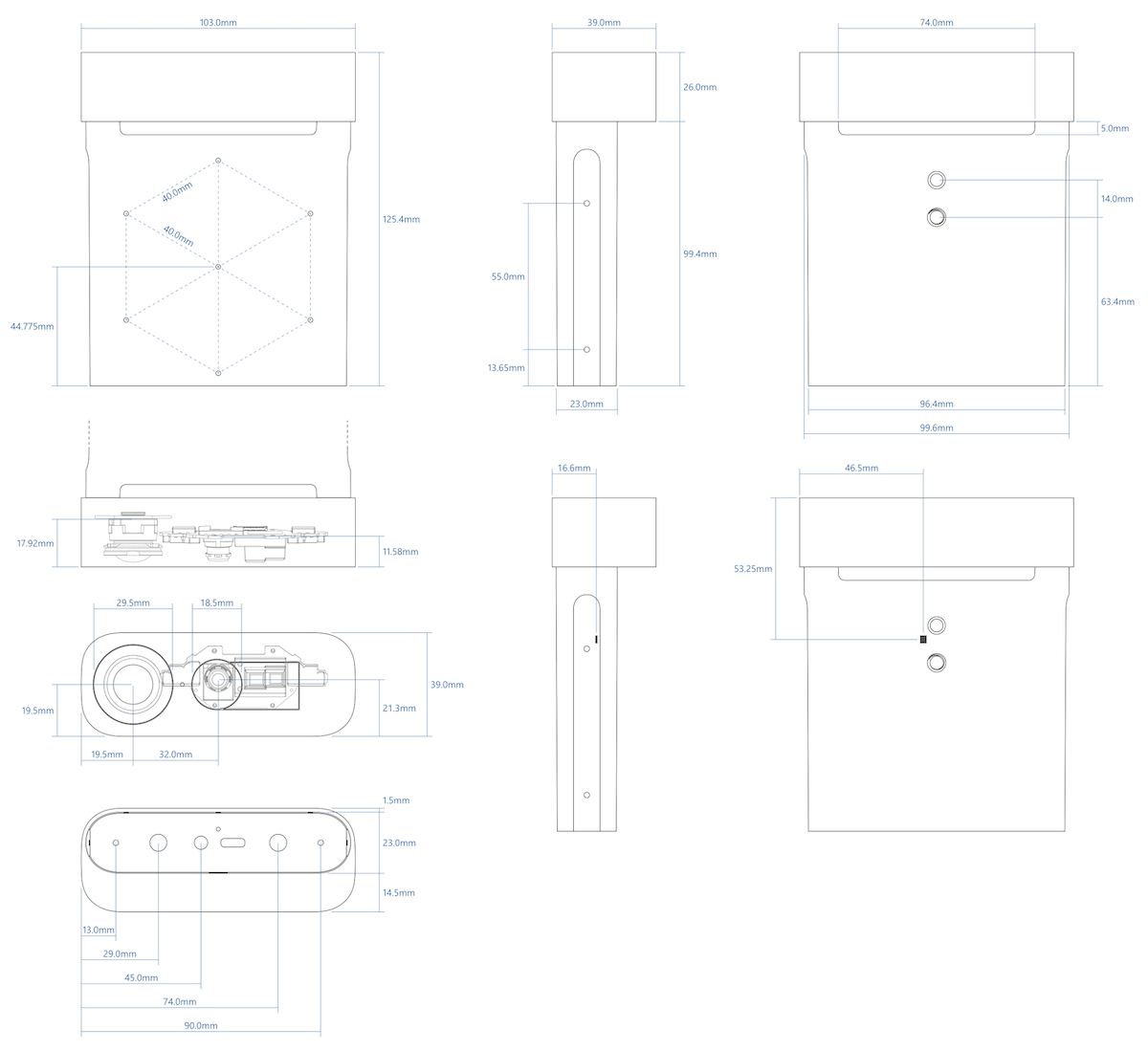
The URDF (#29) specifies links camera_body, camera_base and camera_visor. While the colour and depth optical frames are published by the driver and have reference points in the CAD (https://docs.microsoft.com/en-us/azure/kinect-dk/media/resources/hardware-specs-media/dimensions.png) the links defined in the URDF do not seem to be related to points on the CAD.
Maybe @skalldri can provide some context of how these URDF frames have been chosen.
{kind=link}
Having a clear relation between the URDF and CAD frames simplifies integrating the sensor into a kinematic chain. Specifically, the transformation between external reference points, such as the M3 camera mounting screw, and the optical frames are of interest. But neither the camera_body nor the camera_base seem to correspond to this reference point.
Describe the solution you'd like
Provide virtual frames (links without visuals) in the URDF that correspond to external reference points in the CAD or provide a detailed CAD model with the dimensions of the current URDF frames (camera_body, camera_base, ...).
Describe alternatives you've considered
The alternative is to forgo the URDF and use the provided dimensions from the CAD. However, relying on the URDF to initialise the extrinsic calibration is much more convenient.